
MIT Engineers Develop Soft Robotic Muscles That Mimic Human Movement
In a major leap forward for soft robotics, engineers at MIT have created artificial muscle tissue capable of moving in multiple directions—bringing robotic design a step closer to biological realism.
For years, scientists have tried to replicate the flexibility and complexity of human muscle fibers, which are arranged in intricate patterns to enable versatile motion. Until now, lab-grown muscle tissues used in robotics could typically contract in only one direction, limiting their function to simpler movements like bending at a single joint.
MIT’s breakthrough comes in the form of a new stamping technique that allows researchers to guide the growth of muscle cells along 3D-printed grooves embedded into a soft gel. These microscopic grooves act as templates for the muscle fibers, directing their alignment and allowing them to develop in more complex structures.
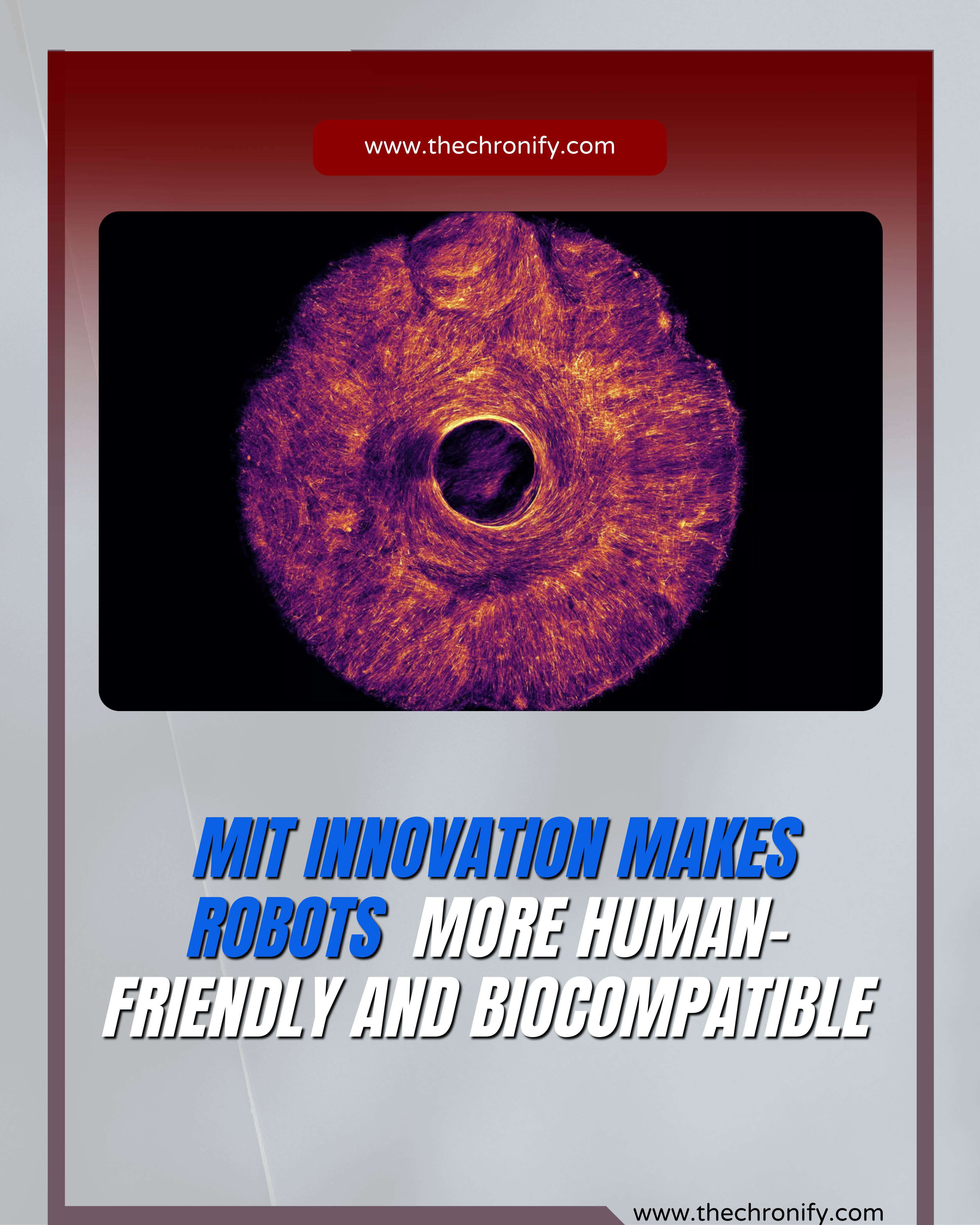
One of the most striking demonstrations of this technique was the creation of an artificial iris—mimicking the muscles in the human eye responsible for adjusting the size of the pupil. By replicating the circular and radial fiber patterns of a real iris, the team successfully built a muscle-powered pupil that can expand and contract just like its biological counterpart.
“This is likely the first robotic muscle structure that can produce force in multiple directions,” said Dr. Ritu Raman, a lead tissue engineer at MIT. “And it’s made possible by this new patterning method.”
Despite challenges—like working with the gel material, which Raman describes as softer than Jell-O and prone to tearing—the team overcame obstacles through extensive experimentation. The flexibility of their stamping approach now allows for the customization of various muscle patterns simply by changing the groove design.
Even more impressive, the stamps themselves can be produced with a standard 3D printer, making this method both cost-effective and accessible. The potential applications are wide-ranging, from mimicking the rhythmic contractions of heart tissue to recreating the twisting motion of intestinal muscles.
Looking ahead, the researchers plan to experiment with a broader range of cell types and tissue structures. Their long-term goal is to integrate these biologically inspired actuators into future robotic systems.
Raman sees tremendous potential in using soft, muscle-like materials in fields like underwater robotics. “Instead of relying on rigid parts, we could design energy-efficient, biodegradable robots that move more like living organisms,” she said. “That’s the future we’re working toward.